

Descarga este artículo en formato pdf
Investigación arqueológica a través de LiDAR en el área de Ceibal
Introducción
Se realizó el levantamiento del mapa por LiDAR (Light Detection and Ranging) para un área de aproximadamente 20 x 20 km alrededor del sitio maya de Ceibal durante la temporada de 2015 (Fig.1). La operación tuvo como metas: 1) verificar la efectividad de LiDAR bajo varias condiciones; 2) examinar rasgos culturales y naturales en el centro de Ceibal más detalladamente; y 3) obtener datos sobre todo de la distribución de sentamientos y otros rasgos culturales, como las condiciones naturales en un área extensa, que sería difícil de cubrir por el método de reconocimiento tradicional. Este artículo discute el aspecto metodológico de LiDAR, los hallazgos nuevos en el centro de Ceibal y los datos espaciales a nivel regional.
Inomata, Haraguchi y Aoyama planificaron la investigación del área de Ceibal por LiDAR, y los datos de LiDAR fueron obtenidos desde el 18 hasta el 21 de marzo de 2015, por el equipo de National Center for Airborne Laser Mapping (NCALM) de la Universidad de Houston, bajo la dirección del Dr. Ramesh L. Shrestha y con la coordinación del Dr. Juan Carlos Fernádez-Díaz. Los datos obtenidos fueron procesados por el Maestro Abhinav Singhania de NCALM, produciendo un DEM (Digital Elevation Model) con una resolución horizontal de 0.50 m.
Inomata examinó los datos de LiDAR y registró rasgos culturales y otros tipos de evidencia relevantes, utilizando ArcGIS para el análisis de DEM y el registro de rasgos y LP360 para la evaluación de puntos de LiDAR (point cloud). En el proceso del análisis, los datos de LiDAR fueron comparados con otras imágenes de detección remota, incluyendo AIRSAR (synthetic aperture radar) obtenido por NASA en 2004, UAVSAR de NASA procesado por Bruce Chapman en 2010, y las imágenes de los satélites IKONOS y LANDSAT. Pinzón y Ranchos realizaron el reconocimiento terrestre de algunas áreas seleccionadas para la verificación de los resultados de LiDAR y para el registro de tipos de vegetación desde el 7 de febrero hasta el 9 de marzo de 2016, y Nasu participó en el estudio de vegetación en la última semana.
Asuntos metodológicos
Se utilizó el equipo de LiDAR Optech Titan que es capaz de obtener más datos que Gemini, el cual fue usado para el mapeo de Caracol, Belice, en 2009 (Chase et al. 2011; Chase et al. 2012). En comparación a Gemini que tiene solo un canal de láser, Titan está equipado con tres canales, lo cual permite funcionar con una PRF (Pulse Repetition Frequency) más alta sin perder la energía de cada pulso de láser. En la región de Ceibal, este aparato de LiDAR, cargado en una avioneta volando en la altitud de 700 m encima del suelo, operó con una PRF efectiva de 450 KHz, lo cual resultó en un promedio de 18 a 21 tiros de laser por cada metro cuadrado (Fig.2). Además, se realizaron vuelos adicionales en diferentes altitudes y con diferentes PRF sobre la parte central de Ceibal para evaluar la penetración de láser.
Importantes asuntos metodológicos en esta investigación incluyen: 1) la técnica de visualización; 2) la efectividad de LiDAR en un área con el bosque tropical denso; y 3) la efectividad de LiDAR para diferentes tipos de vegetación. En cuanto al primer punto, rasgos culturales deben ser interpretados en base a la visualización de los relieves del DEM. La técnica de visualización más común es hillshade, la cual indica relieves por sombras producidas por una luz desde una dirección. Aunque este es un método efectivo, la visibilidad de rasgos cambia dependiendo de la dirección de la luz. Una manera de compensar este problema es combinar las imágenes por luces de múltiples direcciones (generalmente se recomienda la combinación de dieciséis direcciones a través del proceso estadístico del análisis de componentes principales (Devereux et al. 2008). Adrian Chase (Chase 2012) usó la medida de diferencias en elevación para cada celda de DEM con las de los alrededores para detectar aguadas en Caracol. Otros métodos incluyen la gradiente de pendientes (slope gradient), el factor de la vista del cielo (sky view factor) y bonemapping (Bennett et al. 2012; Challis et al. 2011; Pingel et al. 2015; Štular et al. 2012).
Después de comparar varias técnicas, se encontró más efectivo el método de RRIM (Red Relief Image Map) desarrollado por Tatsuro Chiba de Asia Air Survey de Japón (Chiba et al. 2008). Este método combina el parámetro de amplitud (openness parameter) hacia arriba y abajo, lo cual fue originalmente propuesto por Yokoyama y colegas (Yokoyama et al. 2002), con el gradiente de pendientes. Se expresa los relieves positivos con la intensidad del color rojo y los negativos con la de verde. RRIM ha sido utilizado en la investigación de Angkor Tom, Camboya, con resultados positivos (Shimoda et al. 2015). En Ceibal, también, RRIM hizo resaltar relieves sutiles, facilitando la detección de estructuras pequeñas y aguadas. A la vez, es necesario notar que ningún método de visualización es perfecto, y se recomienda combinar diferentes técnicas, dependiendo las condiciones de las áreas estudiadas (Fernandez-Diaz et al. 2014). Además de estos métodos de visualización del DEM, la examinación directa de puntos de reflejos originales de LiDAR (point cloud) puede ser efectiva para la evaluación de rasgos no claros.
Al respeto del segundo punto, la región de Pasión recibe más lluvia que las partes central y norte de El Petén o la parte norte de Belice, y el bosque tropical primario de Ceibal es más alto y denso que aquellas regiones al norte (Fig.3). Reflejos del suelo por tiros de láser en el bosque primario de Ceibal son 1.8 a 2.2 % los cuales son significativamente bajos que los de Calakmul, México, y comparables a los del bosque denso de Mosquitia, Honduras (ver Fernandez-Diaz et al. 2014:Tabla 2). Una pregunta importante es si LiDAR funciona bien para este tipo de bosque. La parte central de Ceibal ha sido mapeada e investigada intensamente por la Universidad de Harvard (Tourtellot 1988; Willey et al. 1975) y por el proyecto de Ceibal por múltiples años, lo cual presenta una oportunidad excelente para evaluar la efectividad de LiDAR. La comparación de los resultados de LiDAR con el mapa de Ceibal exhibe una correspondencia de alto grado, confirmando la eficacia de LiDAR. A la vez, este resultado indica que los mapas de Ceibal elaborados por Ian Graham y Gair Tourtellot en la década de 1960 son trabajos excelentes de alta calidad. Solo se encontraron algunas estructuras muy pequeñas en la imagen de LiDAR, que no han sido registradas en los mapas originales.
En cuanto al tercer punto, la mayor parte de la región de Pasión, incluyendo algunos sectores del Parque de Ceibal, han sido deforestadas y existen diversos tipos de vegetación como pastos, milpas, guamiles y bajos. En las investigaciones de LiDAR en otras partes del área maya se ha notado que LiDAR puede tener algunas dificultades para penetrar vegetaciones secundarias muy densas (Hutson 2015; Prufer et al. 2015). Por esta razón, es importante hacer una clasificación de vegetación del área estudiada y evaluar los diferentes grados de penetración de LiDAR. Se puede obtener los datos sobre tipos de vegetación a través de LiDAR, incluyendo la altura de vegetación (la elevación del primer reflejo – la del reflejo del suelo) y la densidad de fronda (el número de reflejos de vegetación / el de reflejos del suelo). Estos datos generados por la computadora fueron verificados en campo, y se produjo el mapa de vegetación del área de estudio (Fig.4).
Este estudio indica que en áreas abiertas y de pastos bajos se puede detectar a través de LiDAR estructuras de 0.30 m de altura. En áreas de vegetación densa, LiDAR revela la mayoría de rasgos que miden más de 0.70 m a 1 m, sin embargo, la detección de construcciones más bajas puede variar. En particular, plantaciones de palmas africanas con densa vegetación baja dificultan la identificación de estructuras pequeñas.
El centro de Ceibal
Aunque los mapas arqueológicos de Ceibal son excelentes, la imagen de LiDAR agregó hallazgos importantes. El más significativo fue una plataforma basal, esta plataforma gigantesca, que mide 610 m norte-sur y 330 m este-oeste y define el Grupo A de Ceibal ha sido bien conocida. Sin embargo, su forma es difícil de entender desde el nivel del suelo y el mapa de Harvard la dibujó en una forma amorfa. LiDAR revela su forma rectangular bien definida con márgenes rectos (Fig.5). Cabe decir que esta plataforma basal fue una construcción cuidadosamente planificada y diseñada. Los resultados de excavaciones en esta parte por muchos años sugieren que la mayor parte de esta plataforma fue construida durante el periodo Preclásico (Inomata et al. 2013; Smith 1982).
Otros hallazgos importantes son las calzadas (Fig.6). Las calzadas I, II y III, que conectan el Grupo A, el Grupo D y la Estructura 79 fueron mapeadas por el equipo de Harvard. La Calzada IV, que es más pequeña y sale de la parte noreste del Grupo A, parecía terminar sin conectar con un grupo significativo. Melissa Burham notó en la imagen de LiDAR que la calzada parece seguir hacia el noreste. La Calzada IV parece conectar el Grupo A con un grupo ceremonial que fue nombrado como Grupo Pek (Unidades 4G-5 and 4G-12), donde Burham trabajó. En su totalidad, la Calzada IV probablemente mide 570 m. Una calzada nueva (Calzada V) fue descubierta en la parte norte de Ceibal, que no fue mapeada por el Proyecto de Harvard. La Calzada V mide 300 m y conecta dos complejos de estructuras.
Otro tipo de datos proporcionados por LiDAR es de aguadas. Se había notado anteriormente la presencia de algunas aguadas, que posiblemente fueron utilizadas para reservas de agua. LiDAR reveló un considerable número de posibles aguadas asociadas con grupos residenciales. Burham está examinando el uso de estas depresiones a través del análisis de diátomos.
Estudio regional
La mayor ventaja de LiDAR es proveer datos sobre un área extensa que sería difícil de cubrir por el método tradicional de reconocimiento terrestre. Este tipo de investigación ofrece información revolucionaria sobre las relaciones entre múltiples centros y entre ocupaciones humanas y condiciones ecológicas (Chase et al. 2014a; Chase et al. 2014b). En el área de 460 km2 en la región de Ceibal se registraron 10,208 estructuras, 4,538 posibles estructuras, 724 plataformas y 253 posibles plataformas. Aunque la temporalidad de estos rasgos tiene que ser verificada por medio de excavaciones, se puede estimar sus periodos aproximados a través de la comparación de sus formas con los resultados de excavaciones anteriores. Por ejemplo, grupos de estructuras pequeñas y medianas rodeando patios generalmente se fechan para el periodo Clásico. En la región de Ceibal, la mayoría de estos grupos probablemente pertenecen al Clásico Tardío o Terminal (600-900 DC). Se supone que las plataformas amplias que pueden sostener múltiples estructuras comúnmente se fechan para la parte tardía del periodo Preclásico Medio y Preclásico Tardío y Terminal (700 AC-200 DC).
En este sentido, una configuración interesante es el conjunto de tipo Grupo E, que consiste de una pirámide cuadrangular en el oeste y una plataforma alargada o una pirámide con extensiones laterales en el este. Se registraron once conjuntos de tipo Grupo E en el área estudiada, incluyendo el del Grupo A de Ceibal (Fig.7). Estos conjuntos probablemente fueron construidos inicialmente durante el periodo Preclásico Medio o Tardío y funcionaron como focos de actividades rituales comunales durante el Preclásico y periodos posteriores. Además, se encontraron seis conjuntos que se parecen a Grupos E pero en configuraciones menos formales. Otra configuración relacionada es una pirámide con extensiones laterales, pero sin la pirámide oeste del Grupo E. La excavación de una estructura de este tipo en el sitio de Caobal por Jessica Munson (Munson 2012) la fechó para los periodos Preclásico Medio, Tardío y Terminal. Se ha identificado ocho de este tipo de construcción incluyendo la de Caobal. Estos resultados indican que se desarrolló una red de centros ceremoniales alrededor de Ceibal durante el periodo Preclásico.
Se clasificaron los grupos de estructuras en seis rangos según sus tamaños (Fig.8). Se supone que la distribución de estos grupos aproxima el patrón de asentamiento durante el periodo Clásico Tardío o Terminal. Este patrón Clásico exhibe una concentración más fuerte de grupos grandes cerca de Ceibal que el del Preclásico. El análisis de la densidad de estructuras también indica una notable concentración alrededor de Ceibal (Fig.9). Otro aspecto importante es que las ocupaciones humanas tanto del periodo Preclásico como del Clásico se encuentran casi exclusivamente en terrenos altos y bien drenados. Aparentemente evitaron ocupar no solamente partes pantanosas sino también áreas de pendiente suaves alrededor de bajos, las cuales están ocupadas por las poblaciones modernas hoy día. Estas áreas de pendientes suaves pueden haber sido utilizadas principalmente para campos de cultivo y bosques manejados.
Un aspecto notable es la escasez de terrazas agrícolas en esta región, lo cual contrasta con el caso de Caracol, donde se encontró una densa distribución de estos rasgos (Chase et al. 2011; Chase et al. 2012). Además, el análisis tanto de LiDAR como de las imágenes de SAR y LANDSAT no reveló ningún rasgo agrícola en las áreas pantanosas. Es probable que los residentes del área de Ceibal todavía tuvieran suficientes terrenos para cultivar y no sufrieran de la alta necesidad para intensificar producción agrícola con la construcción de terrazas o campos drenados.
Conclusión
La investigación a través de LiDAR en un área de 20 x 20 km alrededor de Ceibal ha ofrecido importantes informaciones metodológicas y arqueológicas. Las conclusiones mayores incluyen: 1) LiDAR penetra menos el bosque tropical primario denso de la región de Pasión que los de Petén central y norte, sin embargo, provee suficientes datos para la detección de la mayor parte de rasgos arqueológicos; 2) la detección de rasgos culturales de menores tamaños en vegetación secundaria muy densa, particularmente plantaciones de palmas africanas, puede ser más difícil; 3) LiDAR ha sido efectivo particularmente en la identificación de construcciones grandes como la plataforma basal del Grupo A y calzadas; 4) se ha identificado la distribución de conjuntos de tipo Grupo E y otros complejos relacionados, los cuales probablemente funcionaron como centros ceremoniales durante el periodo Preclásico; 5) los asentamientos del periodo Clásico Tardío y Terminal parecen exhibir una concentración más fuerte que los del Preclásico; y 6) las ocupaciones de los periodos Preclásico y Clásico se enfocan casi exclusivamente en terrenos altos y bien drenados, lo cual dejó suficientes áreas para agricultura y no creó la alta necesidad para construir terrazas agrícolas y campos drenados.
Agradecimientos
Las investigaciones del Proyecto Arqueológico Ceibal-Petexbatun fueron realizados bajo la autorización del IDAEH. El fondo para LiDAR fue proporcionado por la Japan Society for the Promotion of Science (Grants-in-Aid for Scientific Research no. 26101003) otorgado a Aoyama, y el reconocimiento en campo fue financiado por el fondo de la Alphawood Foundation y una donación del Sr. Augustine Jimenez y la Sra. Susan Jimenez para Inomata y Triadan. El análisis de los datos de LiDAR por Inomata fue apoyado por las becas de Dumbarton Oaks y el Agnese Nelms Haury Program in Environment and Social Justice de la Universidad de Arizona.
Referencias
Bennett, Rebecca; Kate Welham y Andrew Ford
2012 A Comparison of Visualization Techniques for Models Created from Airborne Laser Scanned Data. Archaeological Prospection 19(1):41-48.
Challis, Keith; Paolo Forlin y Mark Kincey
2011 A Generic Toolkit for the Visualization of Archaeological Features on Airborne LiDAR Elevation Data. Archaeological Prospection 18(4):279-289.
Chase, Adrian S. Z.
2012 Beyond Elite Control: Water Management at Caracol, Belize. Tesis de Licenciatura. Harvard University, Cambridge, MA.
Chase, Arlen; Diane Chase, Jaime Awe, John Weishampel, Gyles Iannone, Holley Moyes, Jason Yaegery M. Kathryn Brown
2014a The use of LiDAR in Understanding the Ancient Maya Landscape. Advances in Archaeological Practice 2(3):208-221.
Chase, Arlen F.; Diane Z. Chase, John F. Weishampel, Jason B. Drake, Ramesh L. Shrestha, K. Clint Slatton, Jaime J. Awe y William E. Carter
2011 Airborne LiDAR, Archaeology, and the Ancient Maya Landscape at Caracol, Belize. Journal of Archaeological Science 38(2):387-398.
Chase, Arlen F.; Diane Z. Chase, Jaime J. Awe, John F. Weishampel, Gyles Iannone, Holley Moyes, Jason Yaeger, M. Kathryn Brown, Ramesh L. Shrestha y William E. Carter
2014b Ancient Maya Regional Settlement and Inter-Site Analysis: The 2013 West-Central Belize LiDAR Survey. Remote Sensing 6(9):8671-8695.
Chase, Arlen F.; Diane Z. Chase, C. T. Fisher, S. J. Leisz y J. F. Weishampel
2012 Geospatial Revolution and Remote Sensing LiDAR in Mesoamerican Archaeology. Proceedings of the National Academy of Sciences of the United States of America 109(32):12916-12921.
Chiba, Tatsuro; Shin-ichi Kaneta y Yusuke Suzuki
2008 Red Relief Image Map: New Visualization Method for Three Dimensional Data. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences 37(B2):1071-1076.
Devereux, B. J.; G. S. Amable y P. Crow
2008 Visualisation of LiDAR Terrain Models for Archaeological Feature Detection. Antiquity 82(316):470.
Fernandez-Diaz, Juan Carlos; William E. Carter, Ramesh L. Shrestha y Craig L. Glennie
2014 Now You See it… Now You Don’t: Understanding Airborne Mapping LiDAR Collection and Data Product Generation for Archaeological Research in Mesoamerica. Remote Sensing 6(10):9951-10001.
Hutson, Scott R.
2015 Adapting LiDAR Data for Regional Variation in the Tropics: A Case Study from the Northern Maya Lowlands. Journal of Archaeological Science 4:252-263.
Inomata, Takeshi; Daniela Triadan, Kazuo Aoyama, Victor Castillo y Hitoshi Yonenobu
2013 Early Ceremonial Constructions at Ceibal, Guatemala, and the Origins of Lowland Maya Civilization. Science 340(6131):467-471.
Munson, Jessica
2012 Building on the Past: Temple Histories and Communities of Practice at Caobal, Petén, Guatemala. Tesis de doctorado, University of Arizona, Tucson.
Pingel, Thomas J.; Keith Clarke y Anabel Ford
2015 Bonemapping: A LiDAR Processing and Visualization Technique in Support of Archaeology Under the Canopy. Cartography and Geographic Information Science 42(1):18-26.
Prufer, Keith M.; Amy E. Thompson y Douglas J. Kennett
2015 Evaluating Airborne LiDAR for Detecting Settlements and Modified Landscapes in Disturbed Tropical Environments at Uxbenká, Belize. Journal of Archaeological Science 57:1-13.
Shimoda, Ichita; Tsuyoshi Haraguchi, Tatsuro Chiba y Mariko Shimoda
2015 The Advanced Hydraulic City Structure of the Royal City of Angkor Thom and Vicinity Revealed through a High-Resolution Red Relief Image Map. Archaeological Discovery 4(01):22.
Smith, A. Ledyard
1982 Excavations at Seibal, Department of Petén, Guatemala: Major Architecture and Caches. Memoirs of the Peabody Museum of Archaeology and Ethnology, Vol. 15, No. 1 (editor G. R. Willey). Harvard University, Cambridge, MA.
Štular, Benjamin; Ziga Kokalj, Krištof Oštir y Laure Nuninger
2012 Visualization of Lidar-Derived Relief Models for Detection of Archaeological Features. Journal of Archaeological Science 39(11):3354-3360.
Tourtellot, Gair, III
1988 Excavations at Seibal, Department of Petén, Guatemala: Peripheral Survey and Excavation, Settlement and Community Patterns. Memoirs of the Peabody Museum of Archaeology and Ethnology, Vol. 16 (editor G. R. Willey). Harvard University, Cambridge, MA.
Willey, Gordon R.; A. Ledyard Smith, Gair Tourtellot III e Ian Graham
1975 Excavations at Seibal, Department of Petén, Guatemala: Introduction: The Site and its Setting. Memoirs of the Peabody Museum of Archaeology and Ethnology, Vol. 13, No. 1. (editor G. R. Willey). Harvard University, Cambridge, MA.
Yokoyama, Ryuzo; Michio Shirasawa y Richard J. Pike
2002 Visualizing Topography by Openness: A New Application of Image Processing to Digital Elevation Models. Photogrammetric Engineering and Remote Sensing 68(3):257-266.
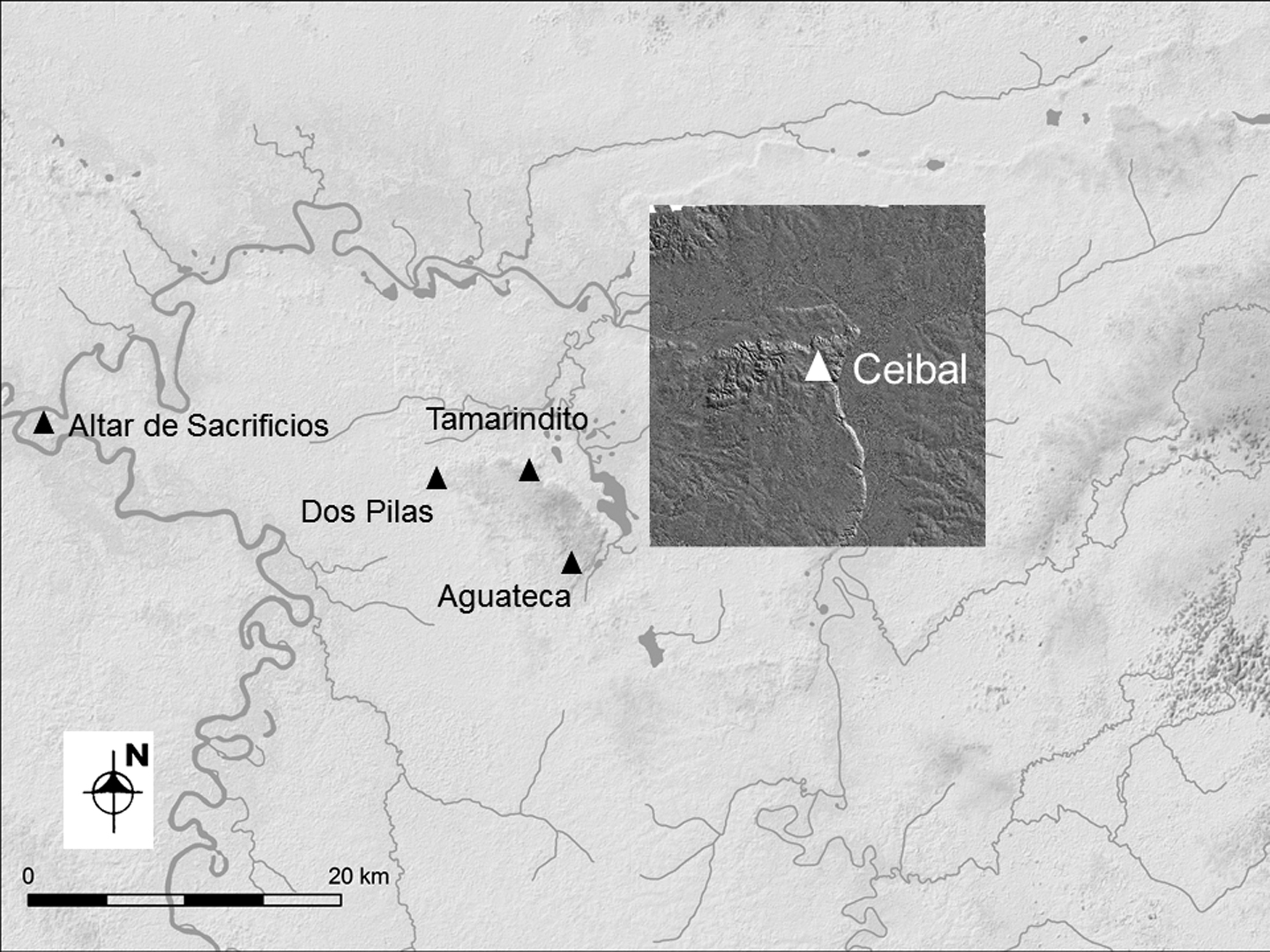
Fig. 1: Mapa de la región del río la Pasión con el área de estudio por LiDAR.
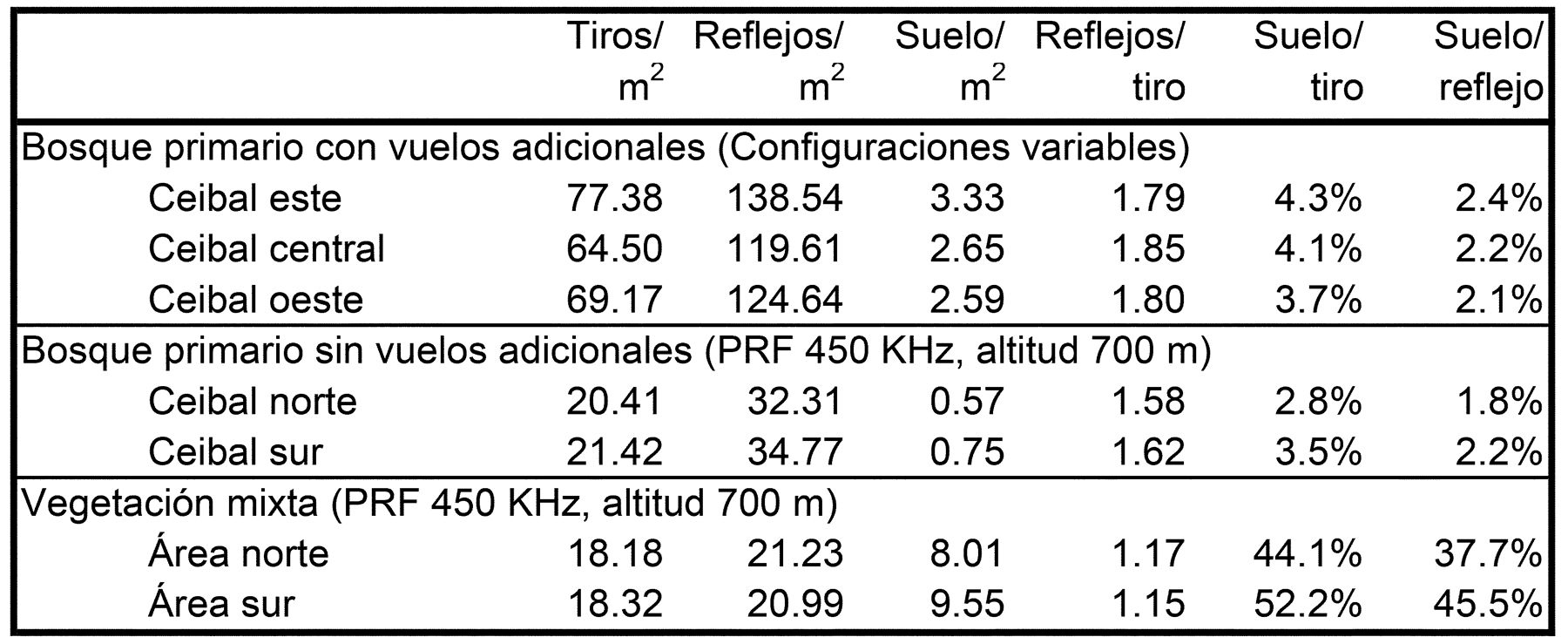
Fig. 2: Sumario de datos de penetración de LiDAR a diferentes tipos de vegetación: tiros de laser por m2; número total de reflejos por m2; reflejos del suelo por m2; números de reflejos por tiro; reflejos del suelo por tiro; y reflejos del suelo por reflejo.
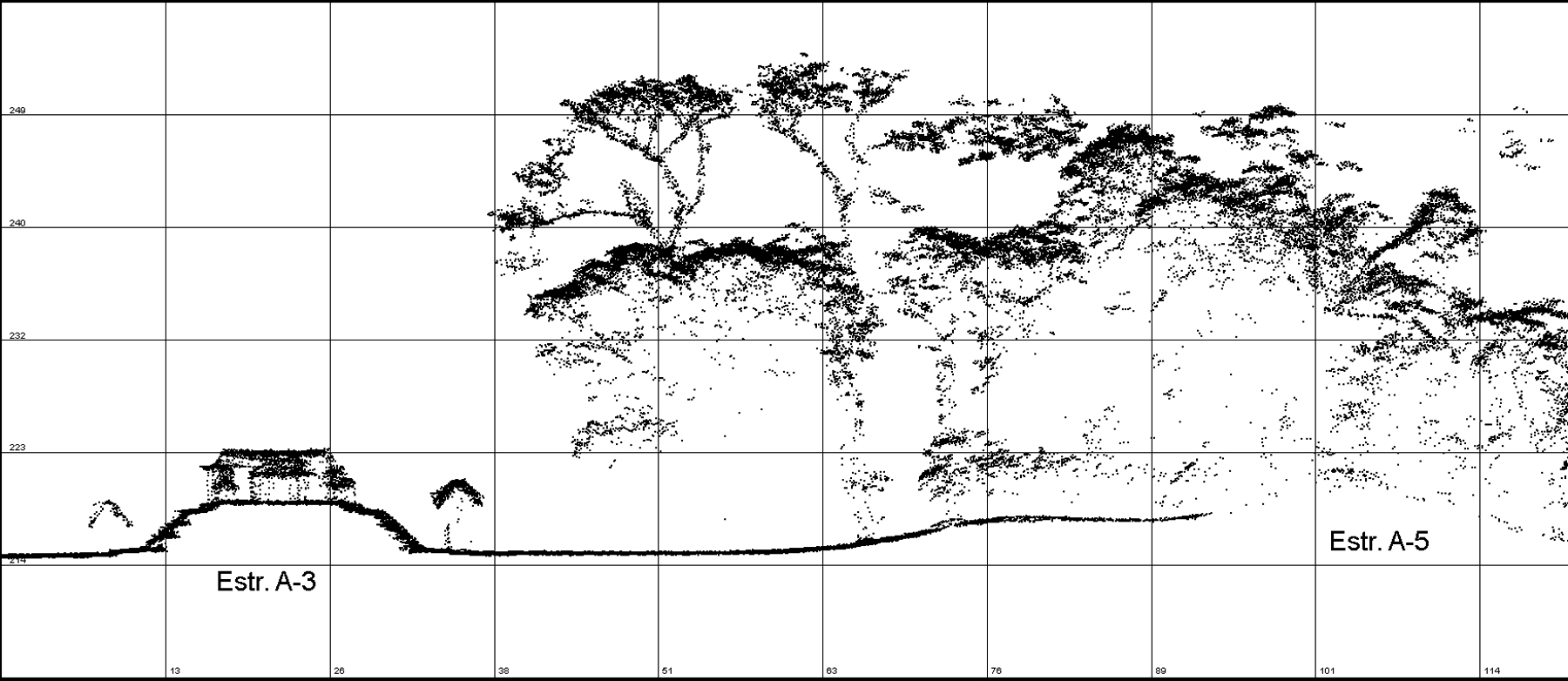
Fig. 3: Puntos de reflejos de LiDAR en la parte central del Grupo A de Ceibal, señalando la Estructura A-3 que es restaurada y la Estructura A-5 que está cubierta por el bosque.
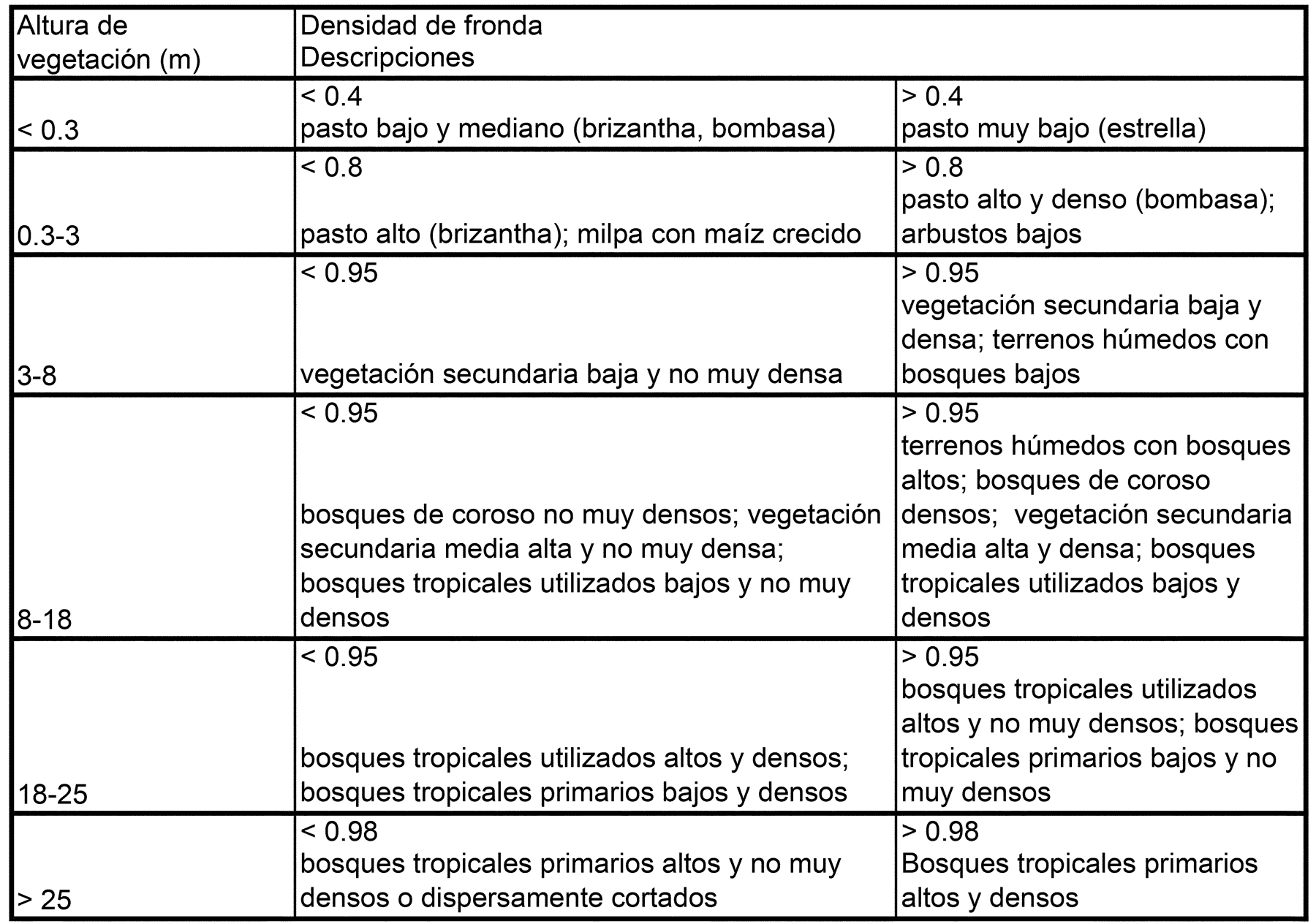
Fig. 4: Clasificación de vegetación en el área de Ceibal en base a la altura de vegetación y la densidad de fronda que fueron calculadas de los datos de LiDAR.

Fig. 5: Imagen de LiDAR del Grupo A de Ceibal, demostrando la forma bien definida de la plataforma basal del complejo.
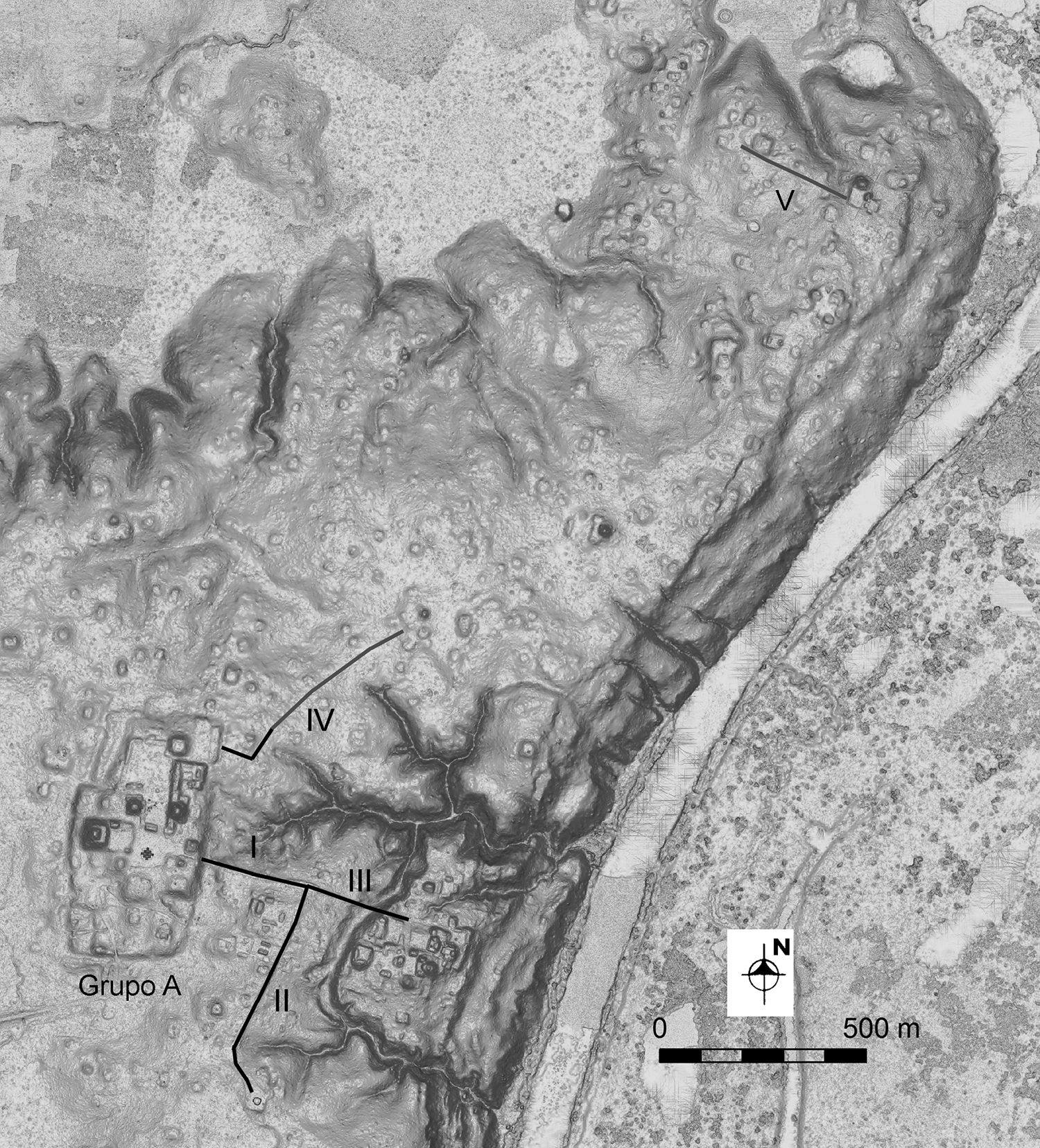
Fig. 6: Imagen de LiDAR de Ceibal señalando las calzadas mapeadas por el Proyecto de Harvard (Calzadas I, II, III y la parte suroeste de IV) y las que fueron descubiertas a través de LiDAR (Calzada V y la parte noreste de IV).
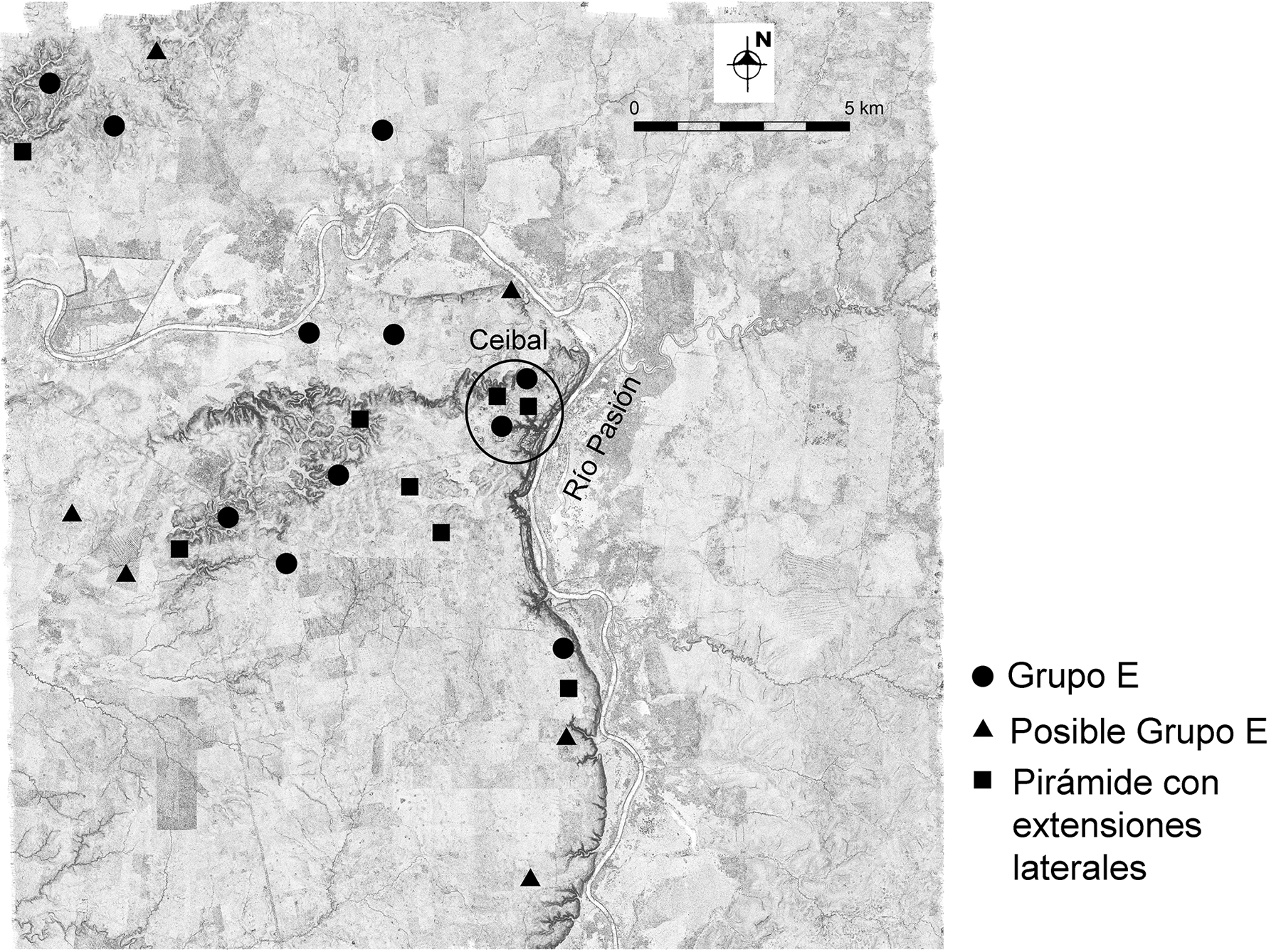
Fig. 7: La distribución de conjuntos de tipo Grupo E y complejos relacionados, que probablemente funcionaron como centros ceremoniales durante el período Preclásico.
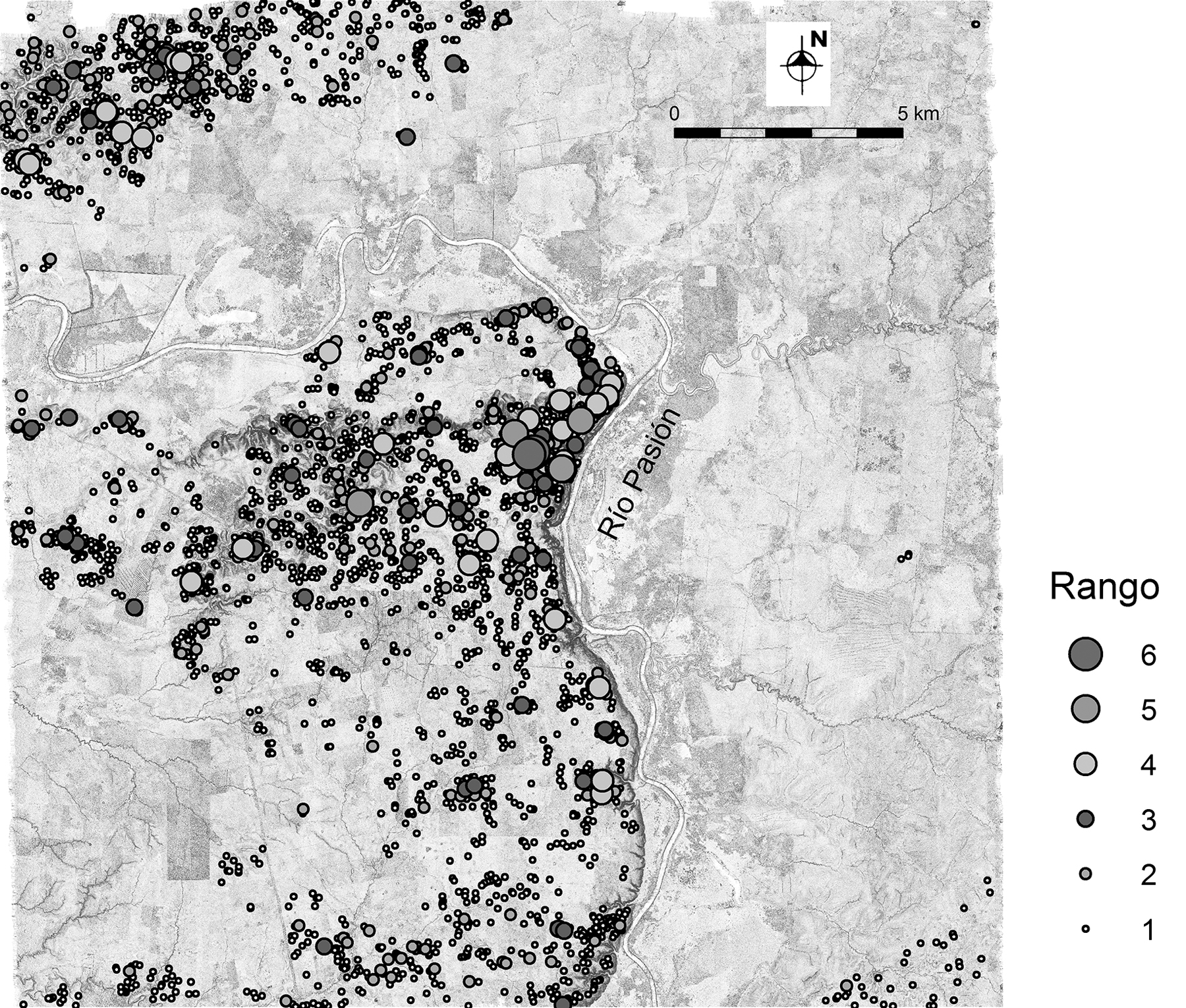
Fig. 8: La distribución de grupos de estructuras por rangos de tamaños, la cual probablemente aproxima el patrón de asentamiento durante el período Clásico Tardío o Terminal.
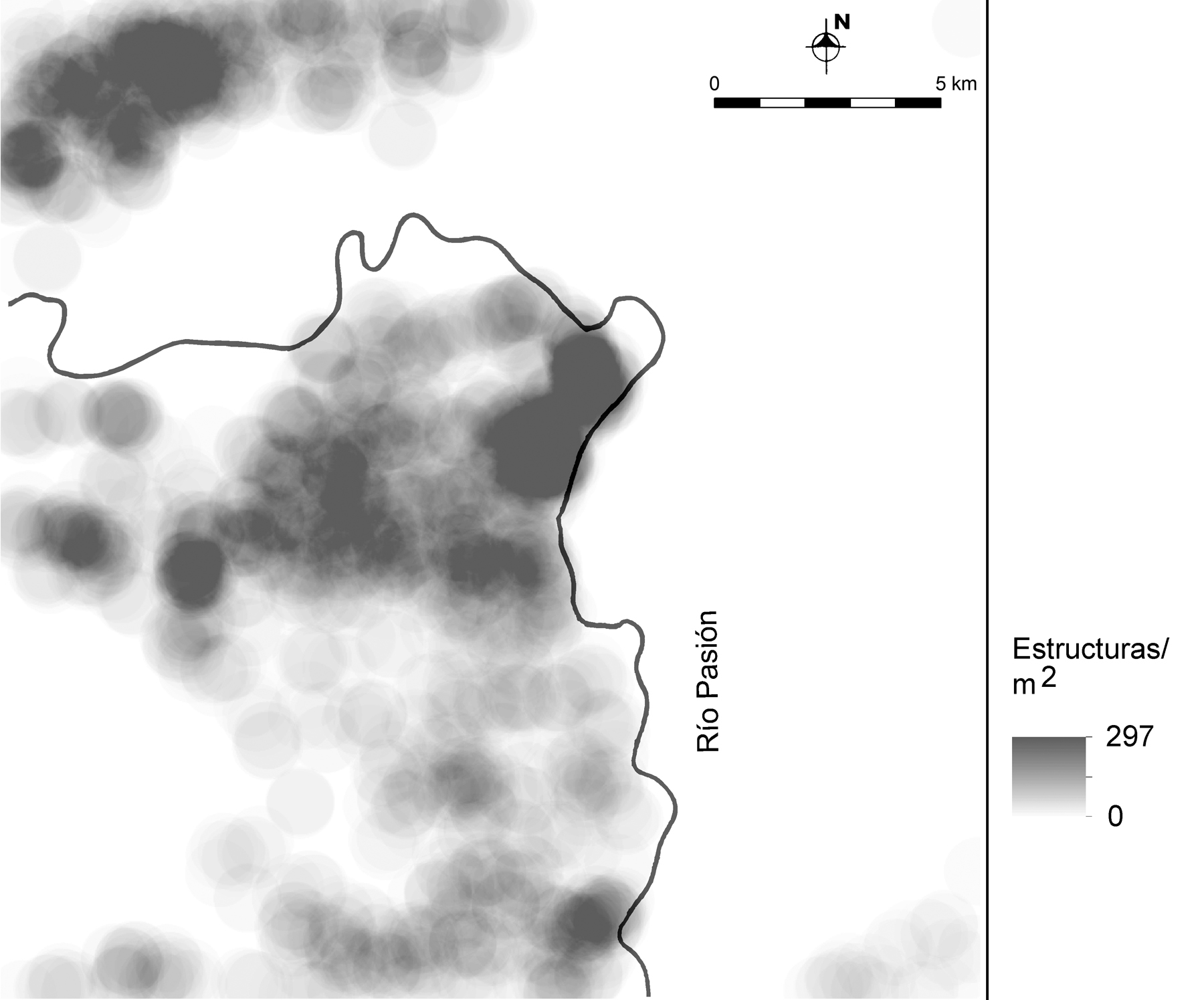
Fig. 9: La densidad de estructuras, que probablemente aproxima la distribución de población durante el período Clásico Tardío o Terminal.